Learning-Based Real-Time Process-Aware Anomaly Monitoring for Assured Autonomy
N. Patel, A. N. Saridena, A. Choromanska, P. Krishnamurthy, F. Khorrami
Published in IEEE T-IV - May 2020
Links: IEEE T-IV page, bibtex
Anomaly Monitoring Framework
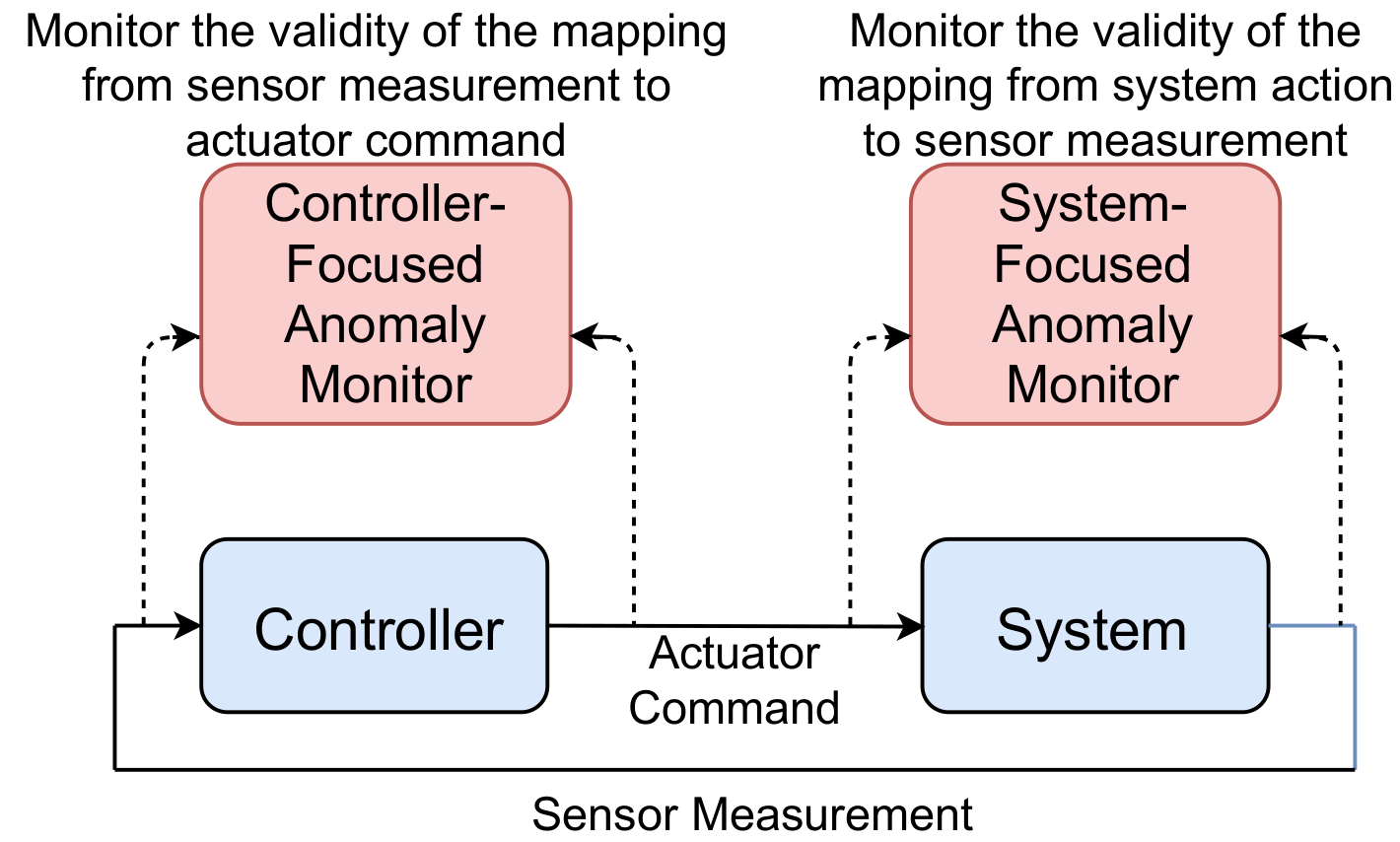
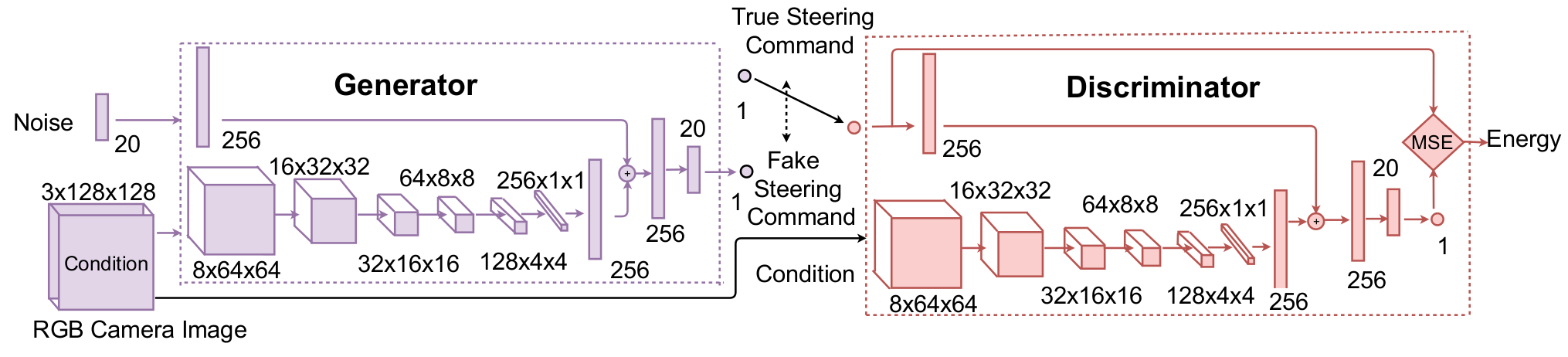
CFAM
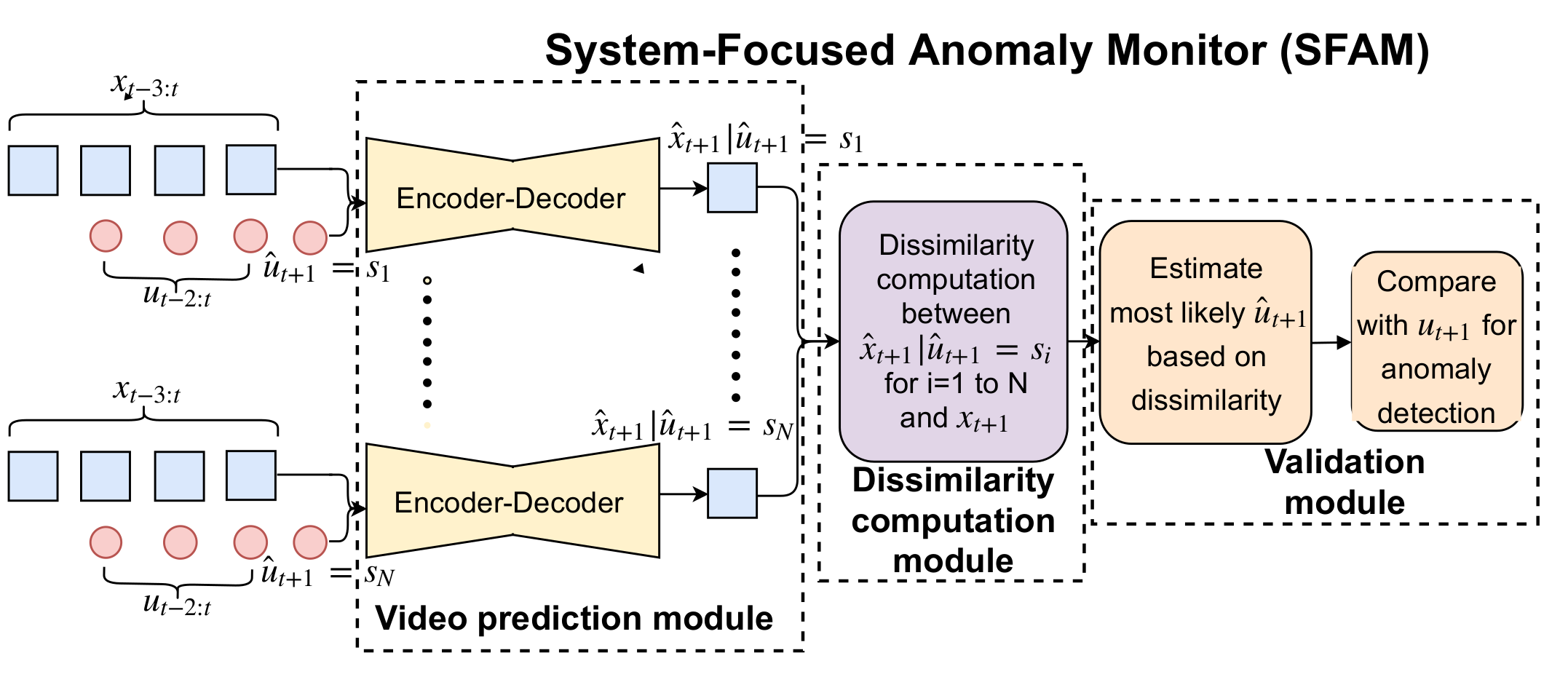
SFAM
Abstract
Various learning-based approaches have been proposed recently for robot control in complex unknown environments. However, ensuring safety in these systems is essential. Learning-based approaches are usually black-box systems which are difficult to interpret/verify. We propose a real-time continuous safety checking system which monitors the validity of the mapping from the sensor input to the actuator command (i.e., controller-focused anomaly detection) and from the actuator command to the sensor input (i.e., system-focused anomaly detection). Our controller-focused anomaly monitor is an image conditioned energy based generative adversarial network in which the discriminator acts as an energy function attributing low energies to proper actuator commands and high energy to anomalous actuator commands. Our system-focused anomaly monitor is based on an action condition video prediction framework, which finds the action conditioned future frame most similar to the actual future frame and compares it with the true action to detect anomaly. We experimentally demonstrate the effectiveness of our framework for an autonomous navigation system in indoor (on datasets from our ground vehicle) and outdoor environments (on Udacity dataset). Furthermore, we show through experimental evaluations that our proposed framework is resilient to various data corruptions common in a vision based system.
Video
Bibtex
@article{PatelSCKK20,
author = {Naman Patel and
Apoorva Nandini Saridena and
Anna Choromanska and
Prashanth Krishnamurthy and
Farshad Khorrami},
title = {Learning-Based Real-Time Process-Aware Anomaly Monitoring for Assured
Autonomy},
journal = {IEEE Transactions on Intelligent Vehicles},
volume = {5},
number = {4},
pages = {659--669},
year = {2020},
}